AUBO-i12协作机器人
产品型号:AUBO-i10
产品系列:AUBO-I系列
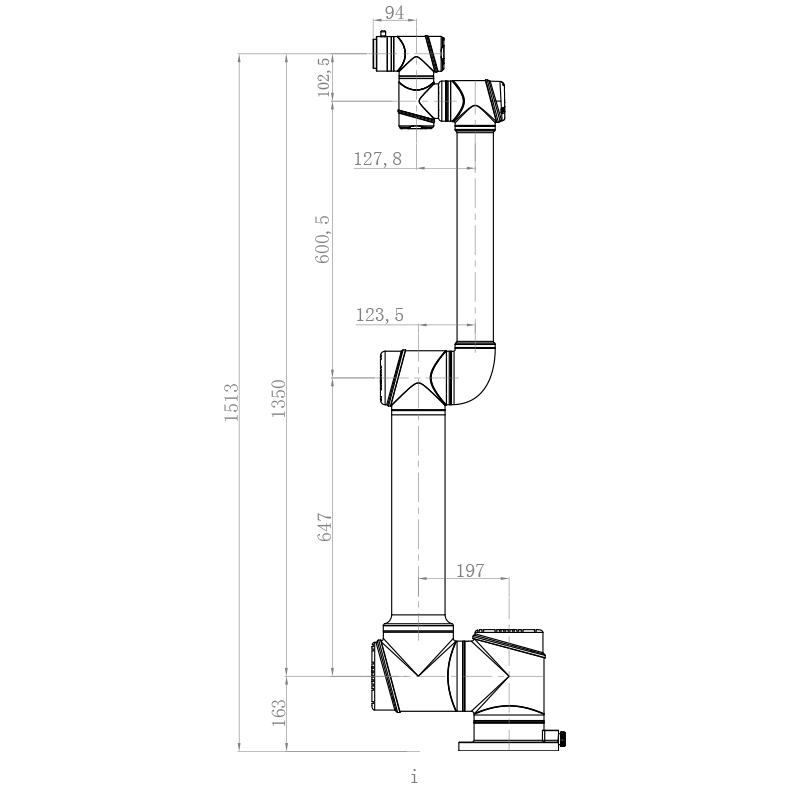
AUBO-i12协作机器人具有1250mm工作半径,还兼具±0.03mm的重复定位精度; 负载12kg,臂展1413mm,最大工作半径1250mm ;大负载、工作半径长,末端可实现±360°旋转
产品详情

产品参数




机械臂参数
关节运动参数
控制柜参数
示教器参数
-
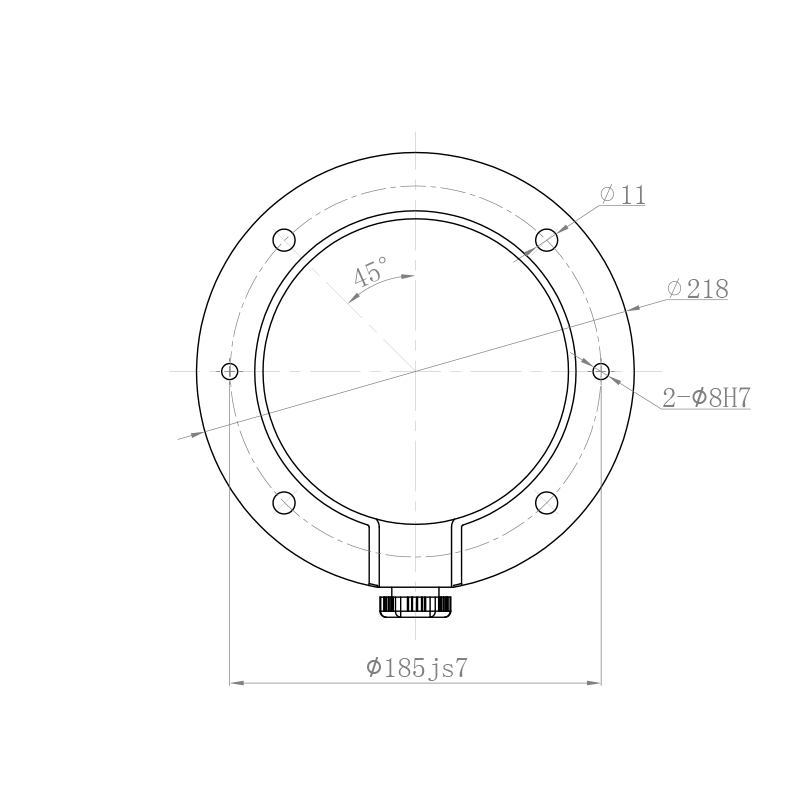
自由度 6 最大工作半径(mm) 1250 负载(kg) 12 重量(kg) 38.5 安装面直径(mm) Ø220 重复定位精度(mm) ±0.03 工具速度(m/s) ≤4.0 平均功率(W) 500 峰值功率(W) 2000 工作环境温度范围(℃) 0-50 工作环境湿度 20%-90% 安装方式 任意角度 防护等级 IP54 -
关节运动参数 运动范围(°) 最大速度(°/s)
joint ±360 178 joint ±360 178 joint ±360 178 joint ±360 178 joint ±360 178 joint ±360 178 -
产品型号 AUBO-CB-M 控制柜尺寸(长*宽*高) 380mm*350mm*265mm 重量 15kg 连接机械臂线缆长度 5m(可定制,最长8m) 连接示教器线缆长度 4m AGV控制柜连接AGV电源柜线缆长度 - 通讯协议 Ethernet/Modbus-RTU/TCP、Profinet(选配) 接口与开放性 SDK(支持C/C++/C#/Lua、Python开发)、支持ROS系统、API 供电电源 100-240VAC,50-60Hz 防护等级 IP43 控制柜IO/工具端IO 控制柜 末端工具 I/O端口 数字输入 16(普通)/16(安全) 4(可配) 数字输出 16(普通)/16(安全) 4(可配) 模拟输入 4 2 模拟输出 4 - I/O电源 输出电压 24V 0V/12V/24V 输出电流 3A Max 0.8A -
产品型号 AUBO-TP 尺寸 355*235*54mm 重量 1.57kg IP等级 IP43 颜色 橙色+黑色
产品尺寸
整机外形尺寸
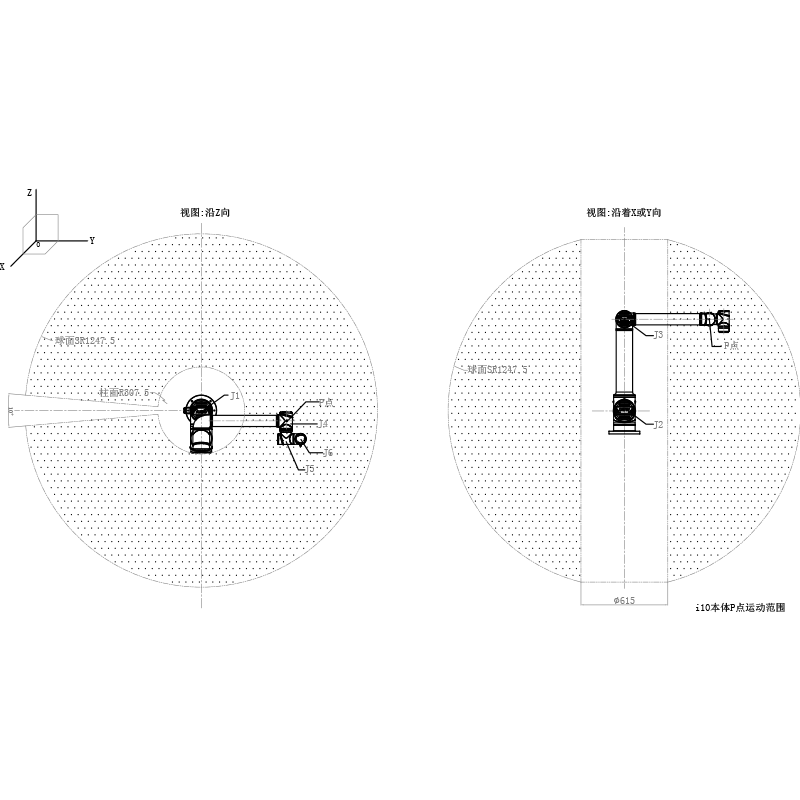
本体P点运动范围
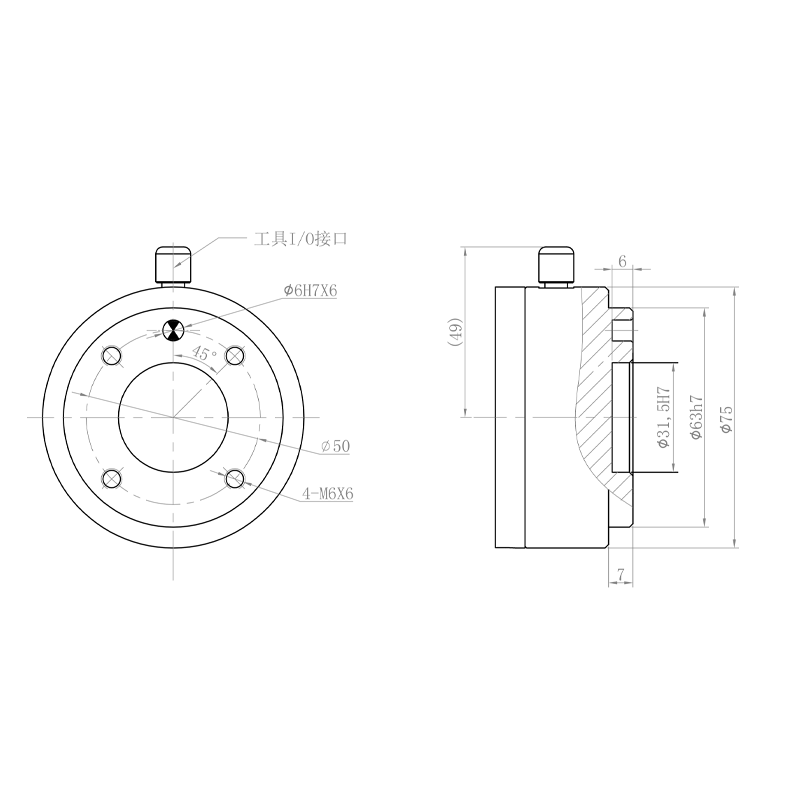
末端法兰
基座俯视图